19 février 2021
Spécification détaillée projet legomindstorm : voiture avec deux bras robotique ( Louis, Hugo, Micah, Aurélien, Ouia, Nicolas)
Equipe des 4eme2 : Voiture à 2 bras robotiques
Participants : Louis, Hugo, Micah, Aurélien, Ouia, Nicolas

I. Description générale
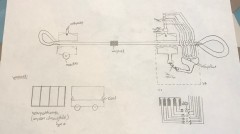
Il y a un élément principale qui peut se mouvoir sur un espace défini et deux autres qui servent à la collecte des déchets. Nous pensons qu’il faudrait mettre en place l’essentiel des robots sur une plateforme mouvante. En effet selon nous il faudrait mettre deux bras robotiques et un contenant pour billes directement sur la même plateforme. Les déchets seraient donc triés dans des bacs différents à la plateforme.
II. Description détaillée
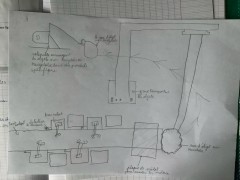
Le véhicule s’arrêtera grâce à des capteurs . Puis le bras robotique prendra les billes et selon la couleur de la bille il la mettra dans le réservoir droit, gauche ou du milieu. Le robot suivra ensuite un parcour prédéfini pour atteindre le deuxième réservoir à bille ou le deuxième bras robot vidra les billes obtenues.
1er bras robotique :
Le capteur de distance enverra une information au bras robotique lorsque la plateforme mouvente arrivera au premier bac.
Option 1, le bras robotique colecte les billes une par une tout en détectent leurs couleurs pour les triers et les mettre dans le bac à couleur.
2ème bras robotique :
Le capteur de distance enverra une information au bras robotique lorsque la plateforme mouvente arrivera au deuxième bac.
Option 1, le bras robotique déposera les billes collecter du premier bac dans le deuxième bac tout en le triant.
III. Fournitures
- 4 roues
- 3 capteurs
- 6 moteurs
- 2 briques
- 2 moteurs de marches
- 2 capteurs de distance
IV. Logiciel
1) le bras robot reçoit l’information de l’arrivée du robot il récupère les billes et les met dans les bacs fait pour. Le robot repart et le deuxième bras reçoit l’information de l’arriver du robot il décharge donc le contenue du premier conteneur.