19 février 2021
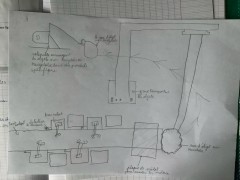
Il y a 3 parties :
Les déchets sont des billes en plastic colorées rouge, vert et bleu. Toutes les billes ont le même diamètre
Chaque robot a un capteur couleur et est affecté au tri d'une couleur
L’objet non recyclable tombe dans un sac en bout de tapis roulant
Un robot de tri sera composé :
-soit de quatre bras robotiques (matériel insuffisant)
- soit de deux avec une mutualisation par 2 couleurs
-soit d’un seul robot avec poussoir vers 4 bacs.
La grue récupère par lot de couleur les objets triés ou le sac de non recyclé
Pour les catapulter dans chaque poubelle spécifique
La puissance de la catapulte va permettre de viser différentes poubelles
Les lancers sont faits dès qu'un objet est posé dans la catapulte.
La catapulte identifie par couleur l'emplacement où elle doit envoyer les objets
Peut-être un tapis pour canaliser l'arrivée des déchets sur la cuillère de la catapulte
3 briques
3 gros moteurs (1 tapis roulant, grue et catapulte)
.. Petit moteur
5 capteurs de distances et couleurs
Quelles briques spécifiques.
-cueillere catapulte ?
1 prog principal (coordination robots)
-> gestion tapis roulant avec capteur et bras
-> grue appelée par le robot lorsque c'est nécessaire
-> gestion de la catapulte