Séance 2 ROBOTYC’S – 26/11/2020
Equipe 2
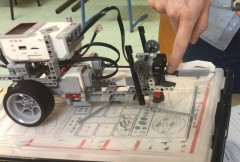
Nous avons réfléchi à la fabrication de la pince du robot trieur.
Il faudrait qu’elle puisse soulever les objets et que le détecteur de couleur détecte le déchet.
Pour cela, nous utiliserons un système de crémaillère et nous devrons réfléchir à comment placer notre robot par rapport à l’objet à transporter.


Dans chaque kit, il y a 4 types de capteurs :
-
1 capteur à ultrasons
-
1 capteur de couleurs
-
2 capteurs de distance
La schématisation du parcours commence à prendre forme, nous utiliserons des lignes de deux couleurs différentes pour délimiter les espaces à parcourir.

Notre mission, pour cette semaine sera de réfléchir à créer un robot avec une pince qui s’écarte, se resserre et se soulève.
Nous aurons aussi la mission de commencer à utiliser le logiciel EV3 de programmation pour faire évoluer nos robots.
En classe, M.Vionnet, le professeur de technologie,fera travailler ses élèves sur la conception d’un robot trieur, cette classe contient des élèves ULIS. Nous attendons avec impatience leurs retours !