Bonjour, nous sommes les moyennes sections de l'école maternelle George Sand de Trappes.
Nous venons de découvrir ces drôles de robots....elles s'appellent des Beebop (comme disent certains élèves)....non ce sont des Beebot !!!! Des petits robots abeilles ;-)
Nous avons bien observé les Beebot et nous avons remarqué des boutons sur son dos. Tout le monde s'est demandé à quoi ils pouvaient bien servir et nous avons fait des hypothèses que l'on a ensuite pu tester.

 La Bande à Thymio
La Bande à Thymio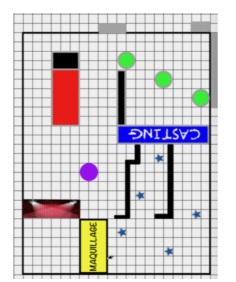




 Par groupe de 2, nous avons écrit des scripts pour réaliser une vidéo de présentation de notre robot.
Par groupe de 2, nous avons écrit des scripts pour réaliser une vidéo de présentation de notre robot.