Nous sommes les élèves de la classe de MS-GS, de l’école maternelle Joliot Curie à Chevreuse.
Dans la classe, nous avons une petite souris dont on peut programmer les déplacements.
Nous avons commencé par découvrir ses boutons :
*une flèche bleue pour aller vers l’avant de la souris
*une flèche jaune pour aller vers l’arrière de la souris
* une flèche orange pour faire tourner la souris vers SA droite (pas vers la droite des élèves), sur place (sans avancer)
* une flèche violette pour faire tourner la souris vers SA gauche, sur place
* un bouton jaune pour effacer la mémoire de la souris
* un bouton rouge pour faire une action spéciale au hasard (se déplacer ou faire du bruit)
* au centre, un bouton vert pour faire démarrer la souris quand on a fini de lui dire les déplacements à faire.

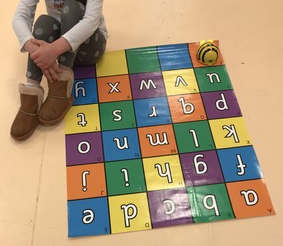
Une fois que nous avons bien compris le fonctionnement de la souris, nous avons eu le droit d’utiliser aussi le robot Beebot qui est en forme d’abeille.
L’abeille fonctionne de la même manière que la souris. Elle a comme boutons :
*une flèche pour faire avancer l’abeille
*une flèche pour faire reculer l’abeille
* une flèche pour faire tourner l’abeille vers SA droite, en restant sur place (sans avancer)
* une flèche pour faire tourner l’abeille vers SA gauche, en restant sur place
* un bouton bleu avec une croix pour effacer la mémoire de l’abeille
* un bouton bleu avec deux traits pour programmer une pause
* au centre, un bouton vert pour faire démarrer l’abeille quand on a fini de lui dire les déplacements qu’elle devra faire.


Au départ, nous avions le droit d’utiliser la souris et l’abeille sans contrainte particulière. Puis nous avons trouvé amusant de faire aller la souris jusqu’à un morceau de fromage en jouet.
Par la suite, l’abeille aussi a eu comme objectif de toucher le fromage, même si nous n’avons jamais vu en vrai d’abeille qui mange du fromage…
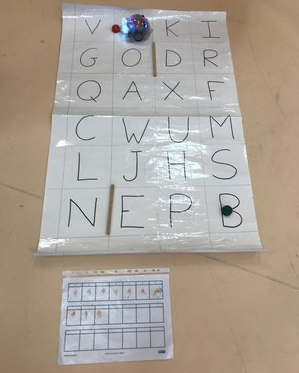
L’objectif était de toucher le fromage avec la souris ou l’abeille, d’abord en allant tout droit, puis en programmant des virages.



Nous avons appris qu’un des objectifs du projet Sqyrob était de pousser des objets. Nous avons alors essayé de pousser des petits objets avec l’abeille mais à chaque fois les objets glissaient sur le côté de l’abeille, sans être poussés. Un élève a alors eu l’idée d’utiliser un combiné de téléphone en jouet et de l’accrocher à l’abeille avec du scotch pour aider à pousser les objets. Cela a plutôt bien fonctionné (mais pas pour des objets trop lourds) !
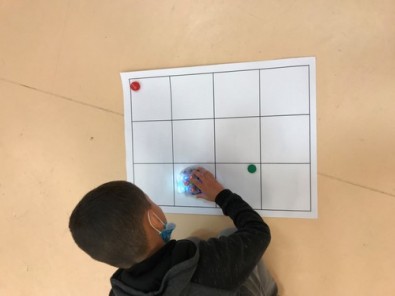
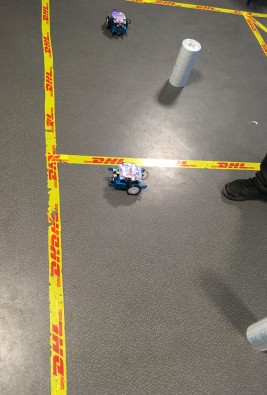
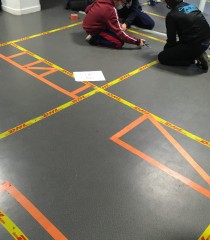
Par la suite, nous nous sommes rendu compte qu’il serait plus facile de prévoir précisément les déplacements des robots si nous avions un quadrillage avec des cases de la même taille que les déplacements des robots. On nous a alors dit qu’il y avait justement un parcours à fabriquer pour le projet Sqyrob. Avec beaucoup d’aide des adultes, nous avons fabriqué un terrain aux dimensions demandées (1,5m x 1,5m !) puis tracé dessus un quadrillage avec des cases de 15cm. Ce quadrillage fonctionne très bien pour l’abeille mais il ne correspond pas aux déplacements de notre souris. Donc nous n’utiliserons pas beaucoup la souris sur ce terrain quadrillé.











 programmation et utilisent maintenant « mBlock » et non Scratch. Ils se donnent à fond. Ils réussissent désormais à commander les robots.
programmation et utilisent maintenant « mBlock » et non Scratch. Ils se donnent à fond. Ils réussissent désormais à commander les robots.



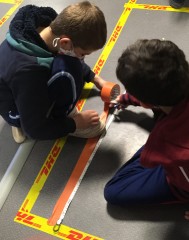
 Nous avions du carton dans la réserve de la salle de Technologie et avons décidé de l’utiliser pour le placer au sol : Chaque partie du parcours sera donc représentée par un carton de 1,5 m /1,5m, soit 4 cartons. A nos règles, ciseaux et crayons !!! Il nous faut les découper dans les bonnes dimensions !
Nous avions du carton dans la réserve de la salle de Technologie et avons décidé de l’utiliser pour le placer au sol : Chaque partie du parcours sera donc représentée par un carton de 1,5 m /1,5m, soit 4 cartons. A nos règles, ciseaux et crayons !!! Il nous faut les découper dans les bonnes dimensions !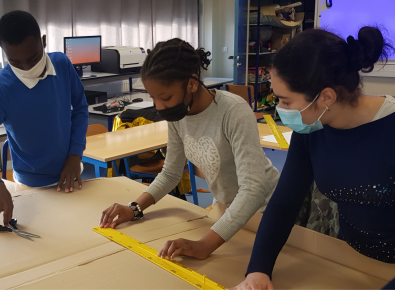
 L’équipe Décoration a bien avancé et a dessiné de jolis logos... le choix va être difficile ! Nous voterons la fois prochaine !
L’équipe Décoration a bien avancé et a dessiné de jolis logos... le choix va être difficile ! Nous voterons la fois prochaine !



 A bientôt pour la suite de notre aventure !
A bientôt pour la suite de notre aventure !