mBot
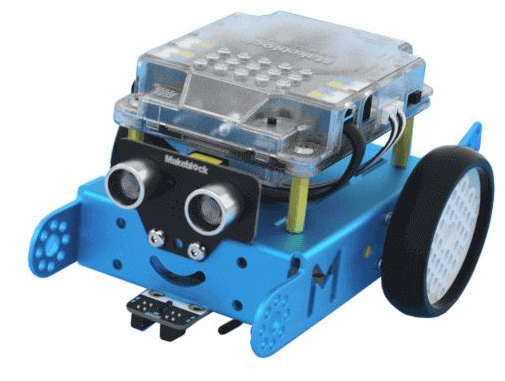
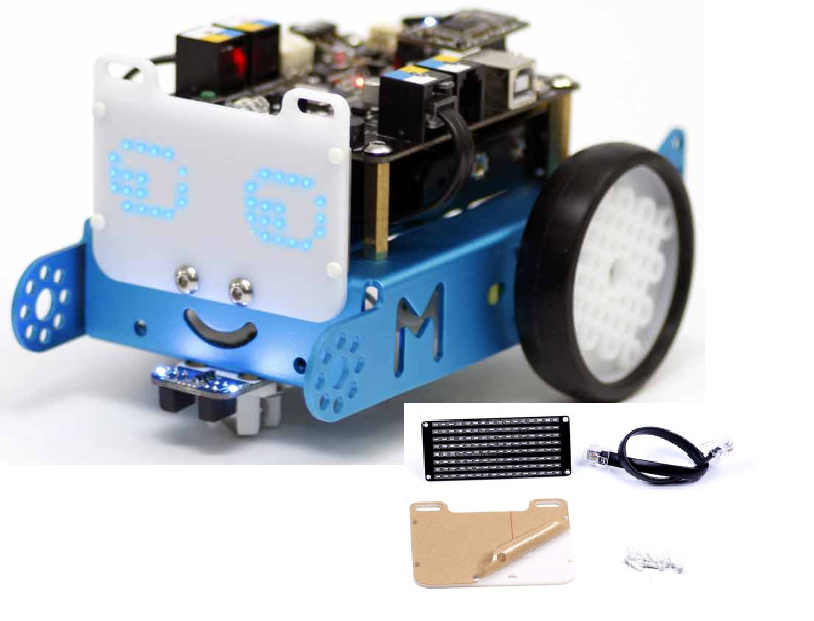
mBot est un robot mobile plébiscité dans la sphère pédagogique. De bonne qualité avec son châssis en aluminium, vous pourrez y ajouter de nombreux capteurs, actionneurs ou servomoteurs, ce qui en fait un robot évolutif.
Il est largement utilisé pour l'enseignement de la robotique au cycle 4 comme au cycle 3. Plusieurs challenges robotiques l'utilisent, tel que le challenge robotique "Vobot" du Val d'Oise par exemple.
mBot se programme via le logiciel mBlock, une version de Scratch 3.0, ou via l’IDE Arduino.
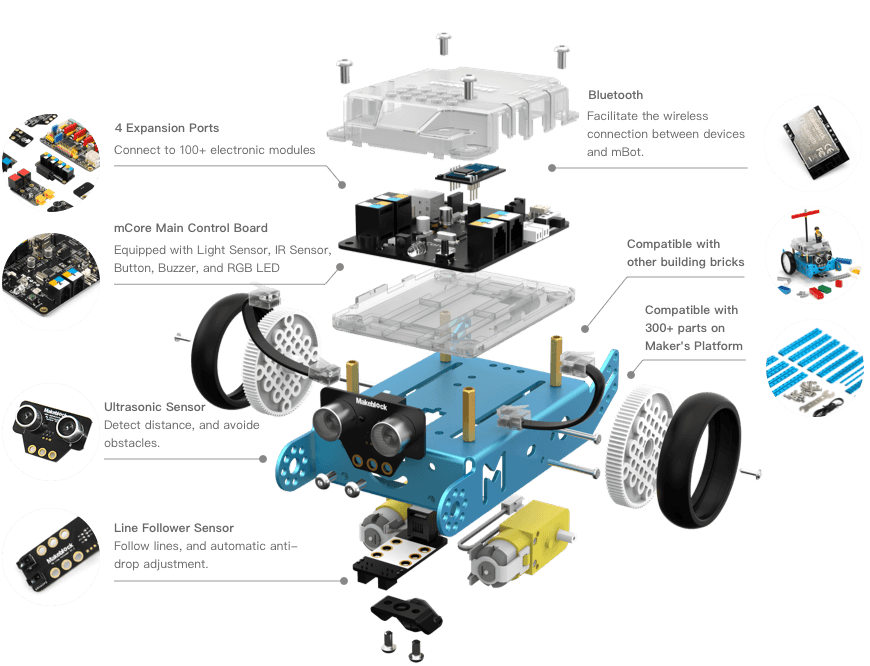
Vue éclatée :
Le mbot peut-être programmé en programmation par blocks. Un logiciel est spécialement proposé et en libre téléchargement, le programme mblock, basé sur Scratch 3.
Présentation de certains de ses modules avec exemple de codes associés :
- Le module DEL RVB, inclus par défaut.
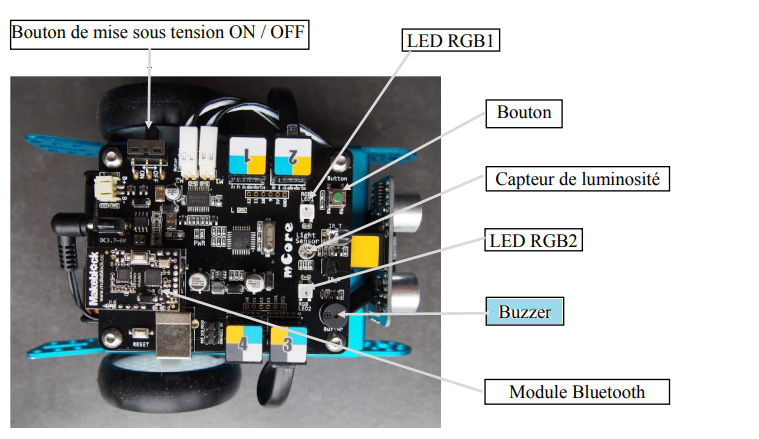
Il y a 2 DEL RVB sur le robot mBot au niveau de la carte de contrôle mCore. RVB signifie Rouge-Vert-Bleu et DEL pour diode électroluminescente.
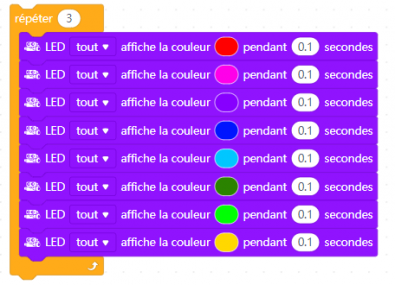
Chaque DEL peut être associée à un niveau de lumière rouge, un niveau de lumière verte et un niveau de lumière bleue de 0 (lumière éteinte) à 255 (lumière allumée à pleine puissance).
En combinant ces lumières, vous pouvez faire une large gamme de couleurs différentes:
Exemple de programme (sous mblock 5) :
- Le module émission de sons grâce à un buzzer, inclus par défaut.
Exemple de programme (sous mblock 5) : Début de la musique issue du film "Le flic de Beverly Hills"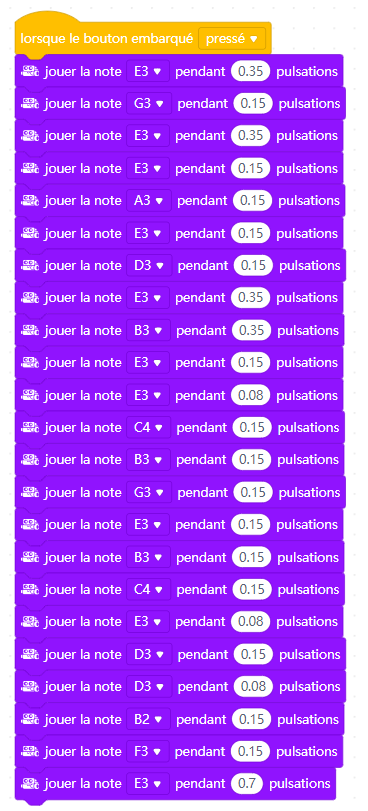
- Le module suiveur de ligne (2 LEDs), inclus par défaut :

Exemple de programme (sous mblock 5) : 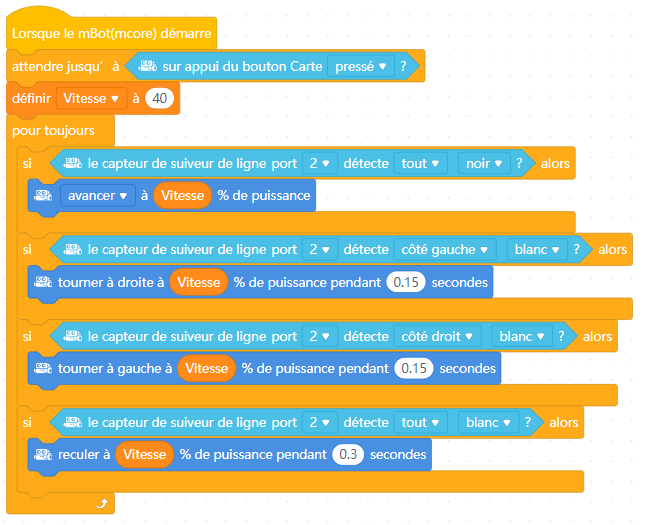
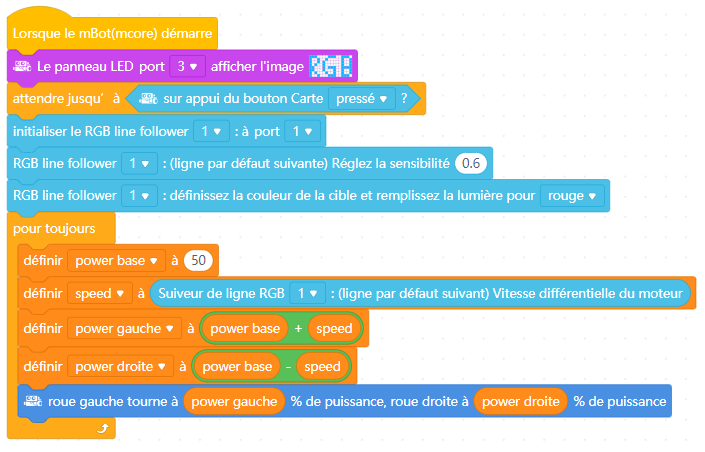
- Le module suiveur de ligne (RGB 4 LEDs), en option.
Le module de capteur suiveur de ligne RGB, comprend 4 DEL RVB et 4 récepteurs photosensibles.

Merci à mes collègues de l'académie de Bordeaux pour la méthode d'apprentissage ci-dessous :
En cas de modification de l'environnement ou de changement d'implantation du capteur RVB, il est conseillé de recommencer l'apprentissage.
Les données acquises seront stockées dans une eprom, évitant ainsi les pertes de données en cas de panne de courant.
Le mode apprentissage se déroule en 4 étapes :
1- Le réglage de la couleur des DEL RGB :
Sélectionnez la couleur appropriée en appuyant longuement sur la touche de commutation. Le choix de la couleur des LED se fait en fonction des couleurs utilisée pour l'arrière-plan et la ligne.
2. Apprentissage de la couleur de l’arrière-plan :
Le capteur RGB implanté, vous devez positionner les 4 DEL RGB face à l’arrière-plan, puis cliquez sur la touche pour faire clignoter lentement les 4 voyants. Attendre l'arrêt du clignotement des voyants.
3- Apprentissage de la couleur de la piste :
Le capteur RGB implanté , vous devez positionner les 4 DEL RGB face à la piste, puis double-cliquez sur la touche pour faire clignoter lentement les 4 voyants. Attendre l'arrêt du clignotement des voyants, l'apprentissage se terminera en 2 ~ 3 secondes.
4. Test et confirmation :
Déplacez le module, afin de vous assurer qu'il détecte correctement les couleurs de l'arrière-plan et de la ligne.
Dans un fonctionnement "normal" (lignes foncées sur un arrière plan clair) :
- le voyant du capteur correspondant à la détection de l'arrière-plan est allumé,
- le voyant du capteur correspondant à la détection de la ligne est éteint.
--------------
Par Christian Dickelé, exemple de programme sous mblock 5 (Merci à Bruno Eben Sang Kotta) : sans l'astuce ci-dessous, il faudrait prévoir la programmation des 16 valeurs possibles correspondant au 4 capteurs (LEDs). Heureusement il y un code plus simple :
- Comparaison des modules suiveur de ligne 2 LEDs VS suiveur RGB :
- Le module infrarouge (IR), réception des signaux émis par la télécommande inclue :
Exemple de programme (sous mblock 3), en remerciant mes collègues de l'académie de Dijon : 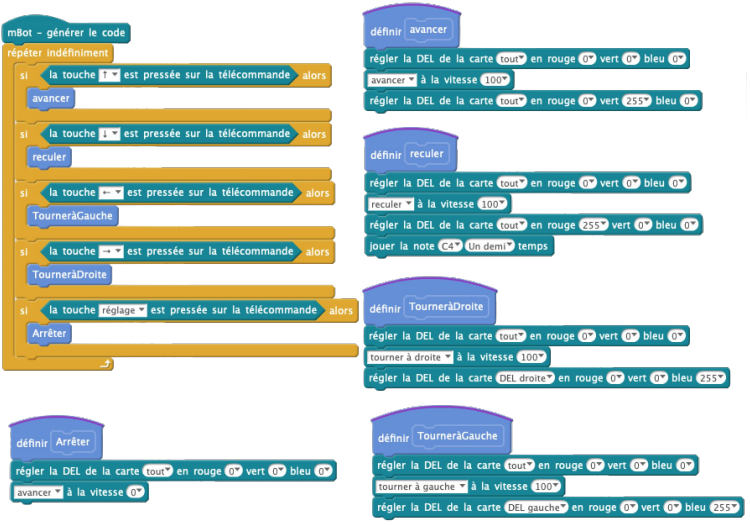
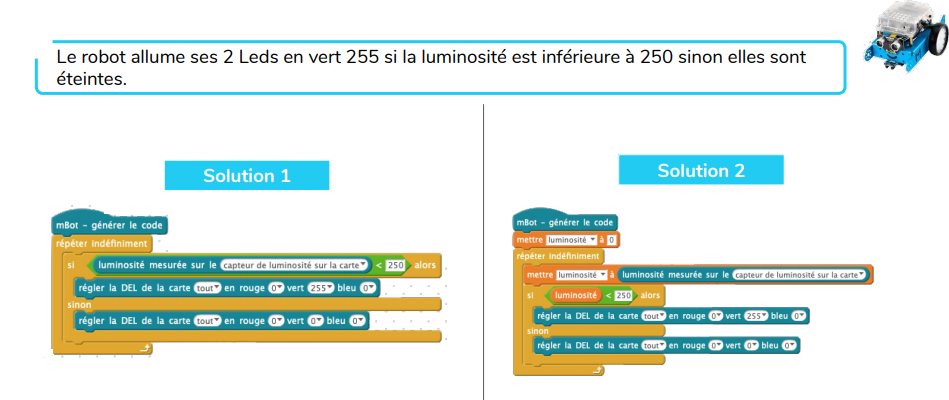
- Le capteur de luminosité ambiante, inclus par défaut.
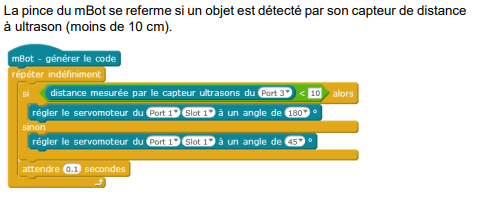
- Le module de détection de proximité ultrason inclus par défaut et le module mini-pince, en option.Ces deux modules sont naturellement souvent associés.
Exemple de programme, sous mblock 3 :
- Le module matrice LED, en option.
La matrice de LED Me (8 x 16) contient un total de 128 morceaux de LED alignés. La couleur est bleue. En recevant des données du tableau principal, il peut être contrôlé pour afficher un numéro, une lettre ou un symbole.
Exemple de programme (sous mblock 5) : 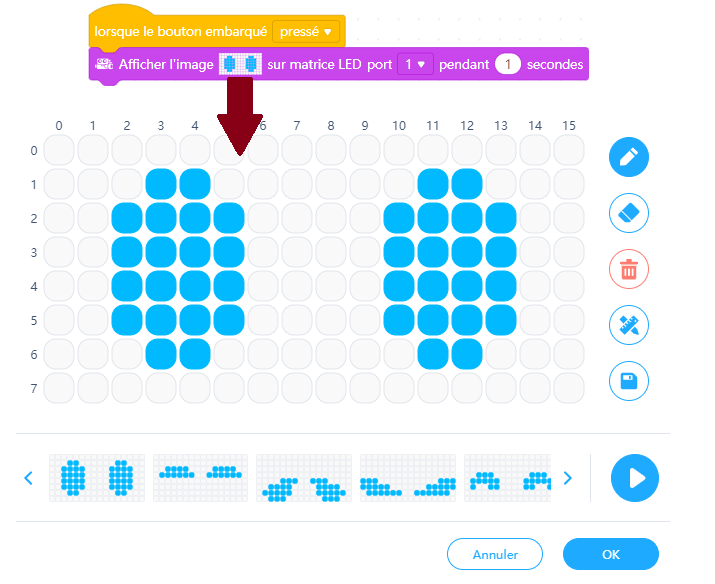
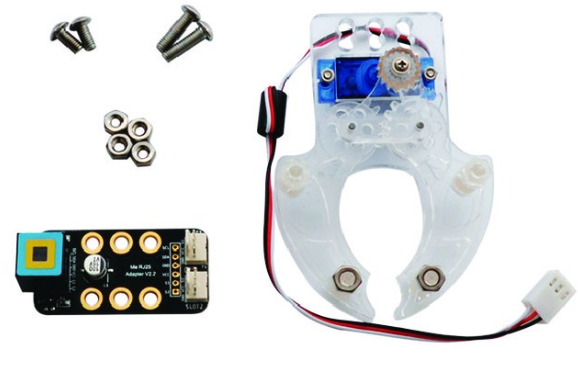
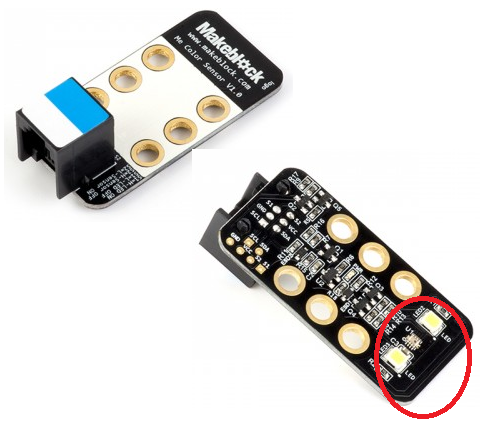
- Le module capteur de couleur, en option.
Le capteur de couleur Me est un capteur de couleur capable de reconnaître six couleurs au total, dont le noir, le blanc, le rouge, le bleu, le jaune et le vert. Le port d’interface de ce module est un bleu et blanc standard et utilise le protocole I2C pour la communication. Il doit être directement connecté à une carte mère dotée d’un port d’interface bleu et blanc.
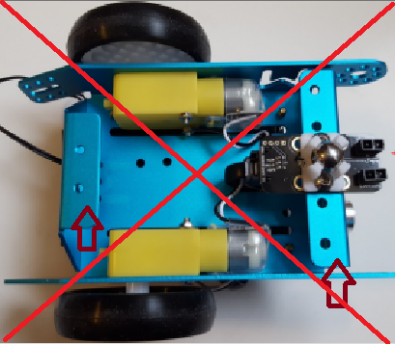
Le capteur couleur est sensible à la hauteur par rapport à laquelle il sera monté sur la chassis du mbot !
Ainsi, j'ai remarqué que si on essaie de monter le capteur directement sous la partie la plus basse du chassis (figure ci-dessous), le capteur de couleur n'est pas en mesure de fonctionner correctement.
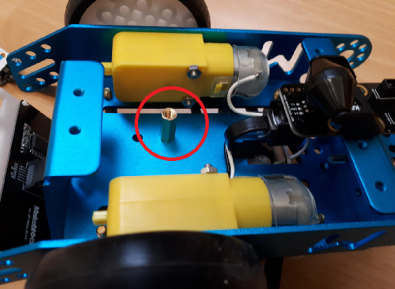
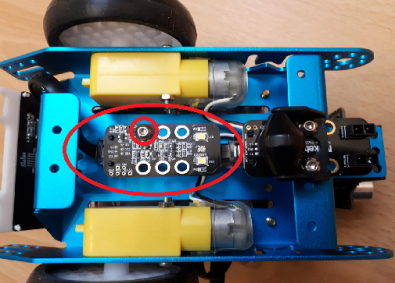
J'opte donc pour un point légèrement plus haut par rapport au niveau du plateau où évoluera mbot, comme indiqué sur les deux photos suivantes :
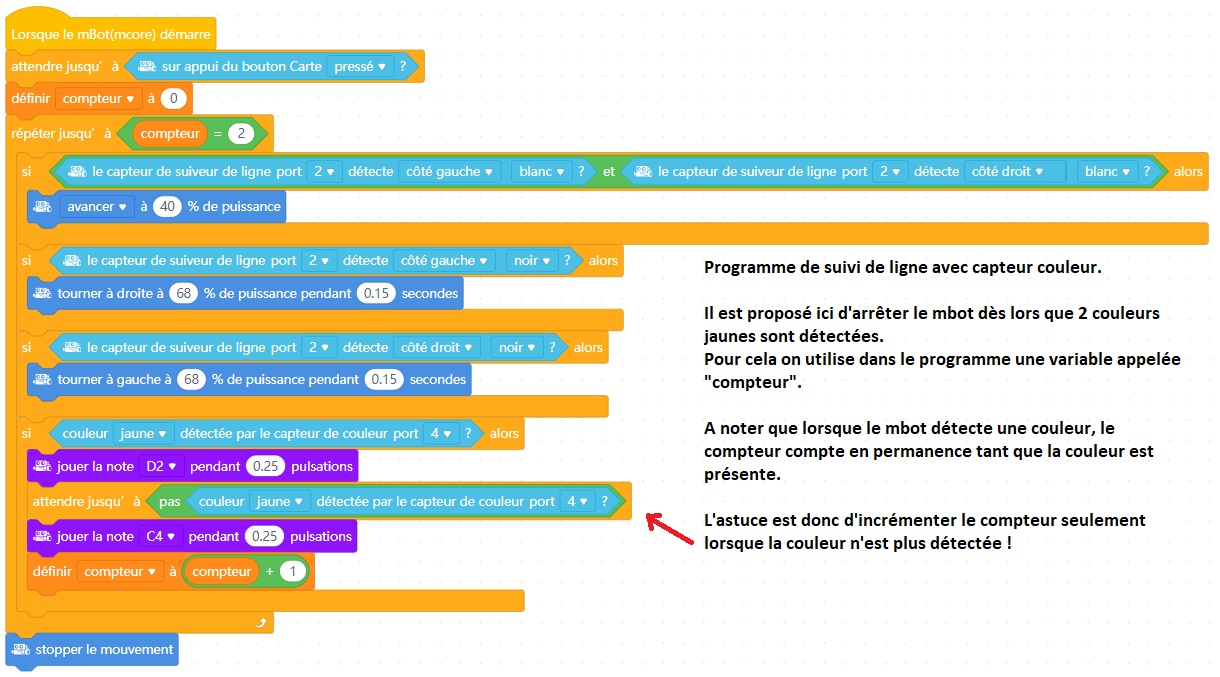
Exemple de programme (sous mblock 5) :
Relever des défis mbot sur le site $_CoDéfi de l'académie de Versailles :