Fabrication des décors et utilisation du plateau quadrillé avec l'abeille BeeBot
Par EMPU_Joliot_Curie__MS-GS le 08 avril 2021, 12:47 - EMPU_Joliot_Curie__MS-GS - Lien permanent
Nous avons essayé d’utiliser notre terrain quadrillé en le posant au sol, mais le terrain est tellement grand que cela était compliqué. Nous avons alors essayé de le poser sur notre grande table triple, mais elle était trop petite et les élèves abîmaient le terrain par inadvertance. Nous avons alors cherché dans l’école une 4e table pour agrandir la table triple. Hélas, cette table était légèrement trop haute par rapport aux autres tables et l’abeille n’arrivait pas à rouler d’une table à l’autre.
Nous avons cherché diverses astuces pour remédier à ce problème. Au final, nous avons rehaussé les trois autres tables à l’aide de kaplas que nous avons scotchés sous les pieds des tables !


Un matin, les élèves ont inventé un jeu avec l’abeille. Ils se sont assis par terre en étoile, en faisant toucher leurs pieds. L’objectif de leur jeu était de passer l’abeille d’un élève à un autre, en programmant correctement les déplacements de l’abeille pour qu’elle arrive exactement devant l’élève voulu.

Avec l’aide de l’ATSEM, les élèves ont fabriqué les décors qui sont à réaliser pour le projet Sqyrob. Ils ont découpé, collé (pour le renforcer) et peint le mur de la déchetterie. Ils ont aussi collé des images et des objets représentant ce qu’on doit mettre dans chaque sorte de poubelle (déchets organiques, recyclage papier-carton-plastique, recyclage verre).
Ils ont ensuite fabriqué un bassin bleu représentant le récupérateur d’eau dont le robot devra faire le tour.
Le terrain quadrillé étant déjà très grand, nous avons opté pour des décors déplaçables, afin de pouvoir réutiliser ce terrain quadrillé pour les 4 zones du grand terrain global.







Nous avons ensuite fabriqué la ruche avec des cartons récupérés. Nous l’avons ensuite peinte. Puis nous lui avons ajouté comme toit une feuille dorée dont la couleur nous faisait penser au miel. Pour finir, nous avons colorié, découpé et collé sur la ruche divers dessins d'abeilles.







Pour fabriquer les zones d'arbres, nous avons utilisé des rouleaux de papier toilette usagés, afin de rester dans une logique de recyclage. Nous avons peint ces rouleaux, ajouté du papier crépon pour le feuillage, peint le sol herbeux et ajouté des fleurs montées sur des tiges fabriquées avec des pailles.






Pour la poubelle présente dans le décor, nous avons tout simplement utilisé une boîte en métal qui était aux bonnes dimensions et déjà décorée.

Pour le banc, le père de l'ATSEM a récupéré et découpé des morceaux de bois que les élèves ont cloués entre eux. Ils étaient fiers de pouvoir utiliser un marteau !



Une fois tous les décors du projet terminés, nous sommes revenus à l'utilisation des robots. Des élèves ont eu l'idée de faire un parcours en kaplas pour la souris. Ils se sont rendu compte que la souris avait besoin d'une certaine largeur pour pouvoir tourner et qu'elle ne tournait hélas pas exactement à angle droit.

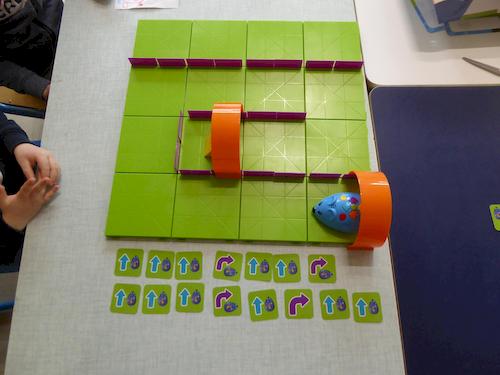
Afin de s'entraîner à programmer des déplacements sur le parcours quadrillé, les élèves ont eu pour tâche de faire suivre à l'abeille le tracé d'une ficelle posée sur le parcours quadrillé.
Au départ, pour se familiariser avec les déplacements, les élèves pouvaient déplacer ou tourner l'abeille en la soulevant après chaque appui sur les boutons de déplacement, puis remettre l'abeille au point de départ et démarrer le programme de déplacement afin de vérifier qu'ils avaient bien réussi.
Par la suite, les élèves ont fait la même activité, mais sans avoir le droit de déplacer l'abeille à la main : ils devaient bien observer le parcours et programmer tous les déplacements directement depuis la case départ. Ils ont alors dû faire attention à l'orientation de l'abeille, sa gauche étant sur notre droite lorsqu'elle nous fait face.


Pour l'atelier suivant, nous avons délaissé la ficelle. Les élèves ont dû programmer dans l'abeille les déplacements qui étaient marqués sur une ardoise et deviner où l'abeille allait arriver, puis vérifier qu'ils ne s'étaient pas trompés en démarrant le programme de déplacement.




Afin de pouvoir pousser des déchets comme cela est prévu dans le défi Sqyrob, nous avons scotché une règle à l'avant de l'abeille. Cela a relativement bien fonctionné, mais la règle est trop longue et gêne les déplacements, surtout lors des virages. De plus, elle ne permet pas de tourner tout en poussant un déchet, lequel glisse sur le côté.



Nous avons alors voulu améliorer l'abeille en remplacement la règle par une pince faite en légos. Nous en avons aussi profité pour ajouter les lettres G et D sous les boutons pour tourner à gauche et à droite, afin de nous aider à repérer la gauche et la droite de l'abeille lorsqu'elle n'est pas dans notre sens. Le problème est que notre abeille, qui déjà dès le début de l'année n'avançait pas toujours très droit (à cause d'une roue dont l'engrenage semble frotter), se mettait alors à avancer vraiment de travers à cause du poids des légos. Nous avons donc abandonné cette "pince" en légos.




Nous sommes alors revenus à l'idée trouvée en début d'année par un élève : un téléphone en jouet scotché à l'avant de l'abeille, car ce téléphone est plus léger que les légos et il est d'une bonne longueur. Cependant, il ne permet pas de conserver un déchet que l'on pousse si on tourne en même temps. Nous avons donc ajouté deux légos légers servant de pinces, mais le résultat n'est pas encore satisfaisant.




Comme notre robot est une abeille et qu'il y a une ruche sur le parcours, nous avons continué sur le thème des abeilles en apprenant une chanson des Enfantastiques sur les abeilles.
Se représenter les déplacements de l'abeille, ainsi que sa gauche et sa droite lorsqu'elle n'est pas dans notre sens, est une tâche difficile, surtout pour les élèves de MS. Nous avons donc longuement utilisé un jeu dit de "programmation des déplacements" dans lequel les élèves doivent décrire à l'aide de cartes les déplacements nécessaires pour aller d'un dessin à l'autre sur un quadrillage.




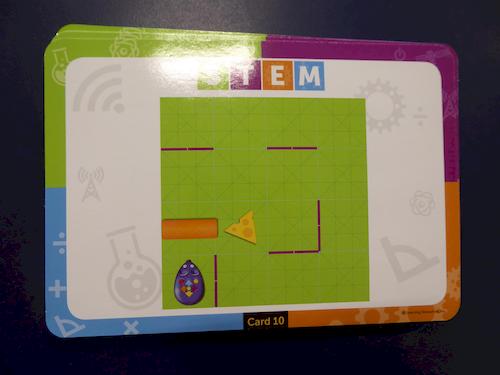
Pendant un après-midi, nous avons laissé l'abeille de côté et nous sommes revenus à la souris, car une autre école nous a prêté le jeu complet (terrain et cartes de déplacement) correspondant à notre souris. Merci beaucoup à eux !
Nous avons imaginé de nombreux parcours différents pour lesquels nous devions prévoir les déplacements de la souris afin qu'elle puisse aller jusqu'à son fromage. Lorsqu'un élève programmait les déplacements sur la souris, il le disait à haute voix, afin qu'un autre élève écrive ce déplacement à l'aide des cartes. Puis on vérifiait que le trajet prévu était correct.
La souris a un aimant au bout du museau qui la fait "chanter" lorsqu'elle rejoint le fromage qui contient lui aussi un aimant. Il existe sur la souris une "action spéciale" qui lui fait faire une action aléatoire parmi un bruitage ou un déplacement "avant-arrière".
Les élèves ont dû s'adapter au fait que la souris avance et tourne encore moins droit que l'abeille...






Nous sommes ensuite revenus à notre abeille et l'avons utilisée sur différents décors.
Après une tentative avortée pour perfectionner les "pinces" de l'abeille, nous avons commencé par l'utiliser pour pousser des déchets : mouchoir (propre!), plastique et verre dans la déchèterie.


Puis nous l'avons fait circuler sur le terrain où se trouvent arbres, banc et poubelle.


Puis, sur un 3e terrain, l'abeille a circulé autour du récupérateur d'eau.


Enfin, sur le 4e terrain, l'abeille a fait le tour de la ruche pour finir en rentrant à l'intérieur.



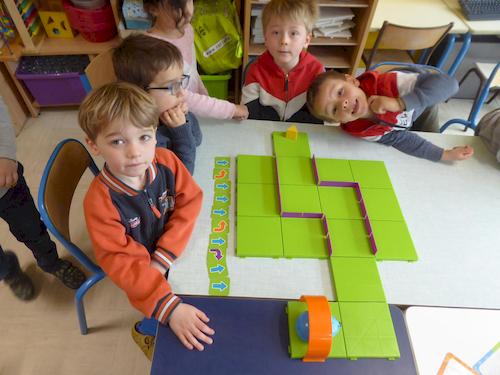
Le problème de l'abeille, hormis le fait que la nôtre n'avance pas très droit, c'est qu'elle ne sait pas où se trouvent les déchets et qu'à moins de ratisser tout le terrain de long en large, elle n'arrivera pas à trouver des déchets pour les apporter ensuite dans la déchetterie. La classe a donc fait la découverte d'un nouveau robot, Thymio. Les élèves ont testé les programmes déjà préenregistrés dans Thymio et ils ont pu remarquer à quel point ce robot est nettement plus sophistiqué que l'abeille.
Le mode "jaune" est un mode découverte dans lequel le robot évite des obstacles. Les élèves lui ont fait un parcours avec de nombreux obstacles.

Le mode "rouge" est un mode "peureux" dans lequel le robot fuit dans la direction inverse des capteurs activés.
Les élèves ont donc remarqué une différence majeure entre Thymio et l'abeille, c'est qu'il possède des capteurs qui lui permettent de connaître son environnement : 5 capteurs à l'avant, 2 à l'arrière et 2 au-dessous qui sont très pratiques pour que le robot sache s'arrêter avant de tomber, lorsqu'il ne détecte plus de table sous lui.


L'autre différence majeure avec l'abeille, c'est que le robot Thymio est programmable. On ne programme pas uniquement ses déplacements. On peut lui faire effectuer n'importe quel programme du type "Si on appuie sur ce bouton ou si ce capteur est activé, alors faire ce déplacement-ci ou ce bruit-là." Les élèves ont juste eu un bref aperçu du logiciel de programmation que nous utiliserons après les vacances.
