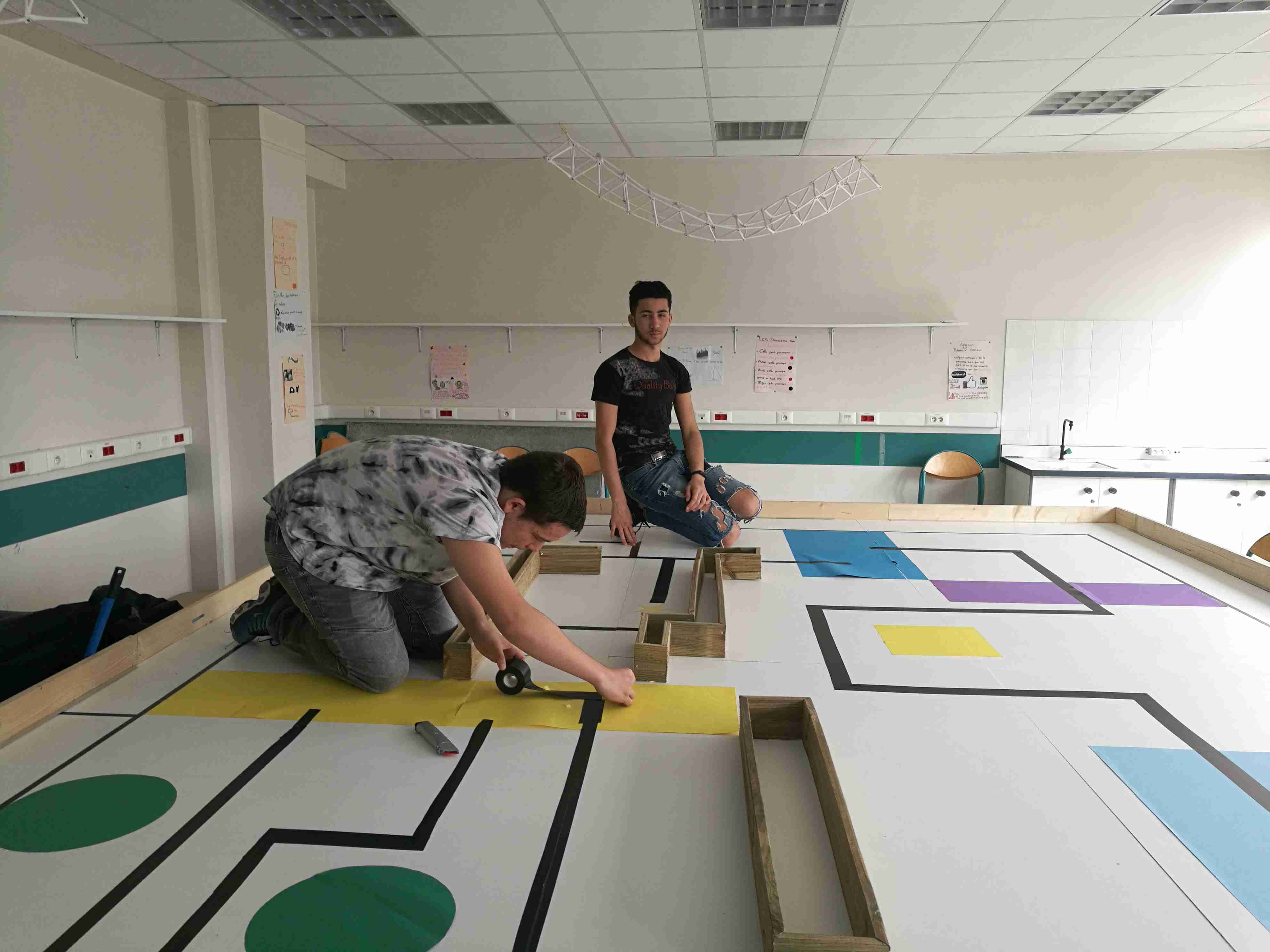
La programmation de nos robots (la galère)
Nous avons essayé plusieurs approches pour répondre à la demande du concours SkyRob. Voici un petit résumé de nos approches (et de nos galères). C'est M Chapron qui s'est occupé de nous pour cette partie.
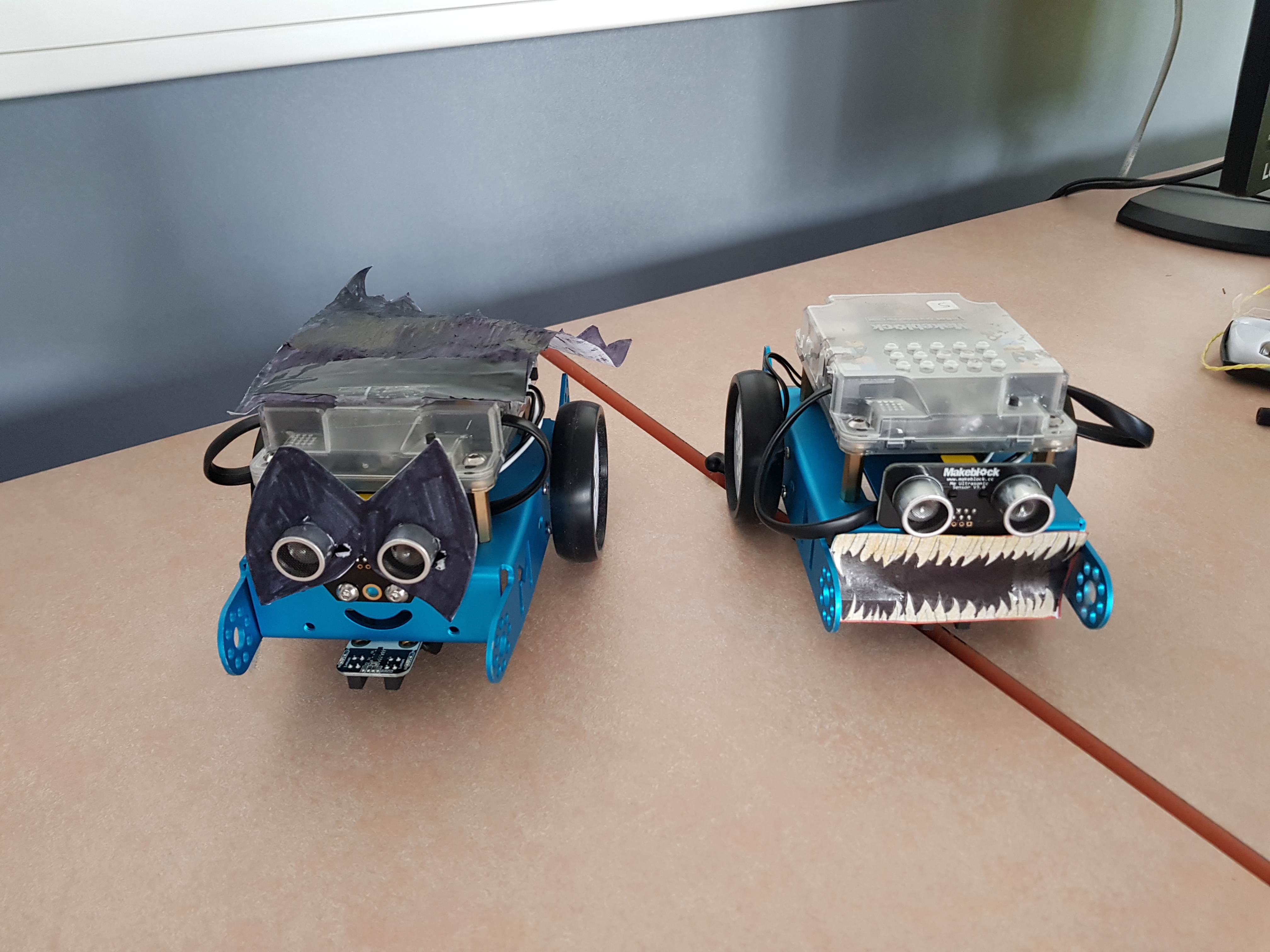
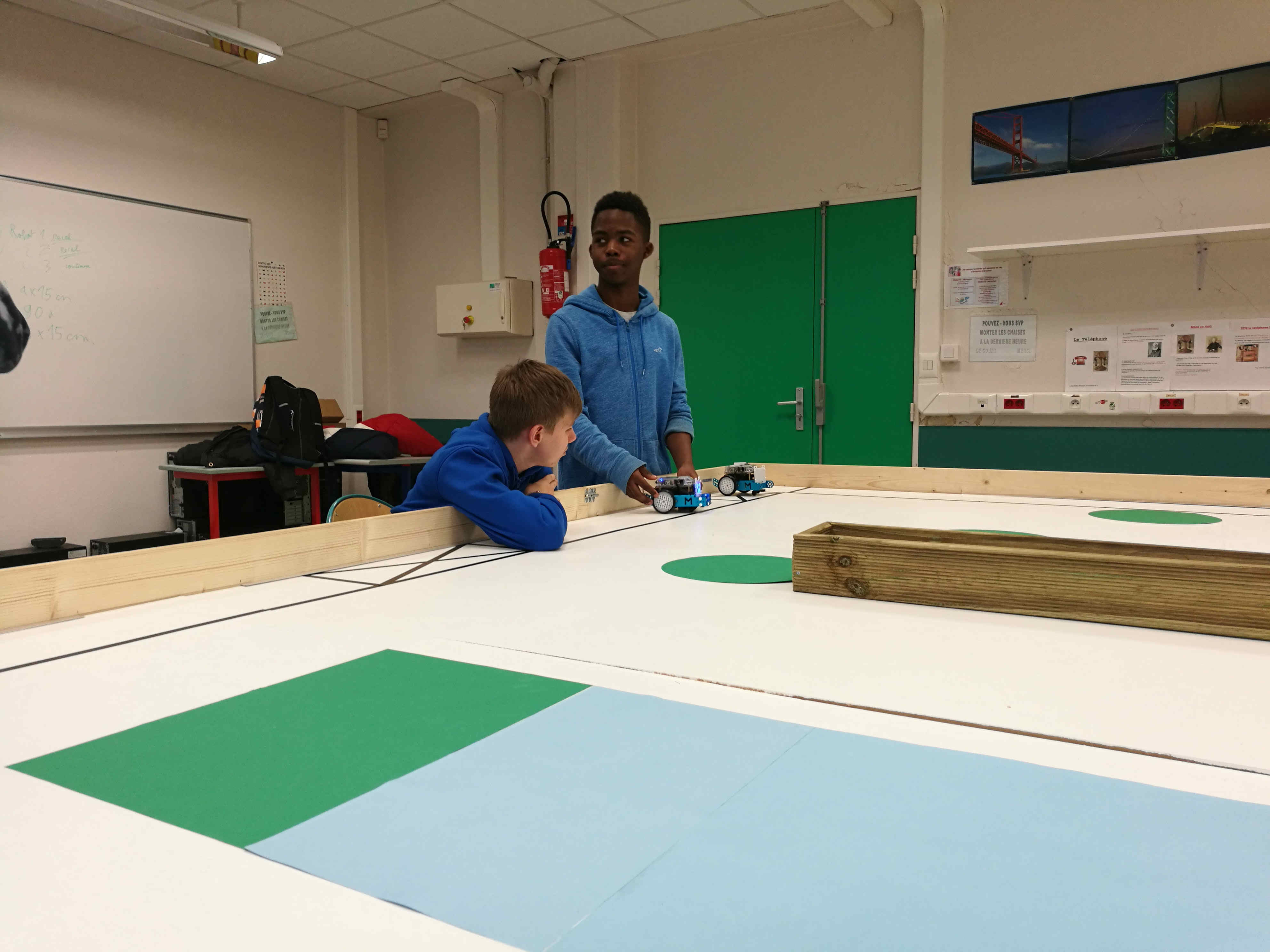
Au début nous avons créé les programmes avec des simples “avancer” et “tourner” ce qui n'était vraiment pas précis, les robots ne roulaient jamais droit et se bloquaient dans le décor :/
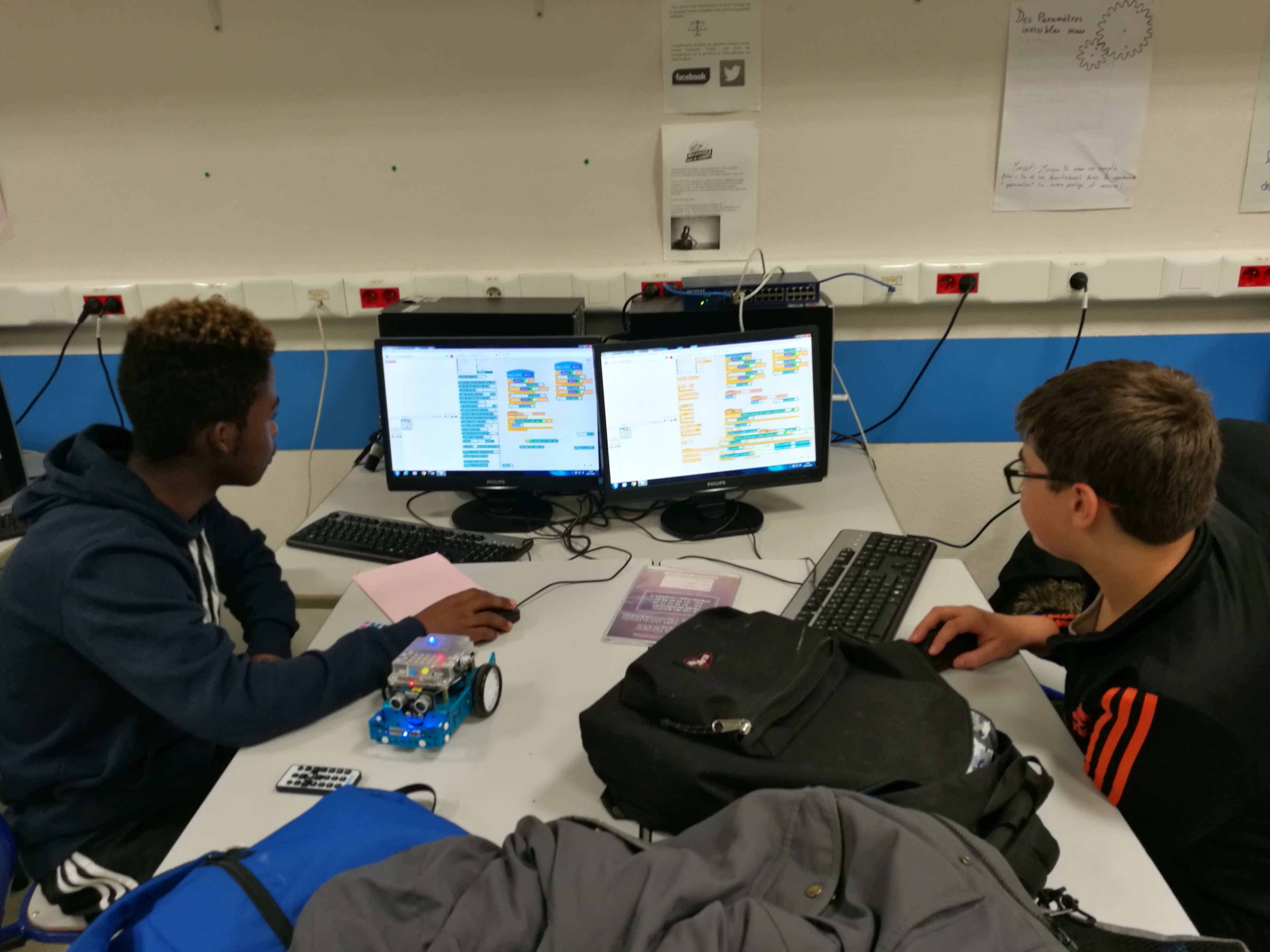
Nous avons donc dû changer notre méthode de travail et nous avons décidé d'utiliser des suiveurs de ligne (ce ne qui n'a pas été sans problème non plus).
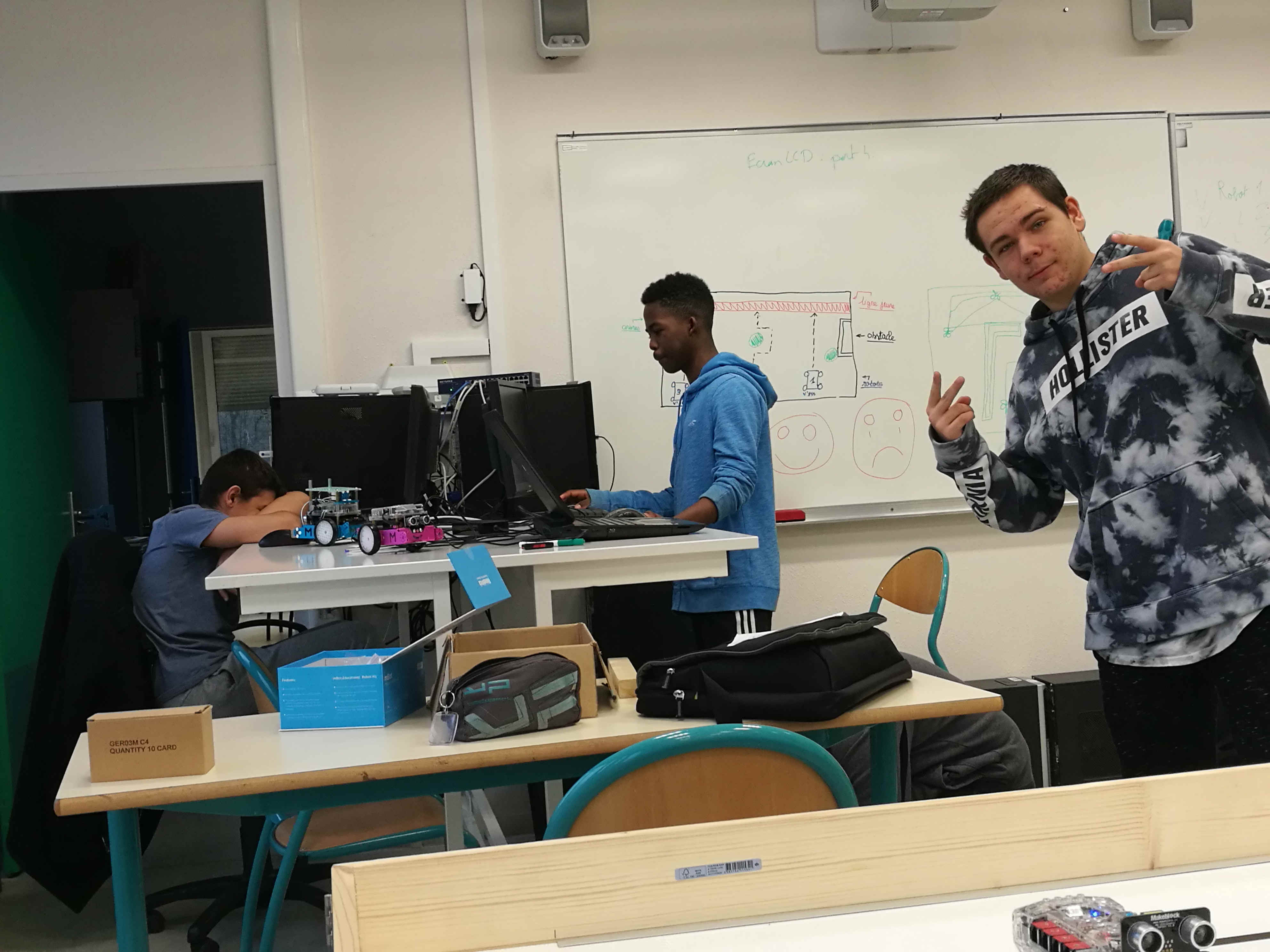
Après avoir créé notre programme suiveur de ligne (dur dur), Nous l’avons testé et il ne marchait pas ... il nous a fallu du temps pour comprendre qu'il fallait en fait téléverser le programme dans le mbot pour que le programme s'exécute en temps réel.Le problème venait de la latence de connexion robot/pc.
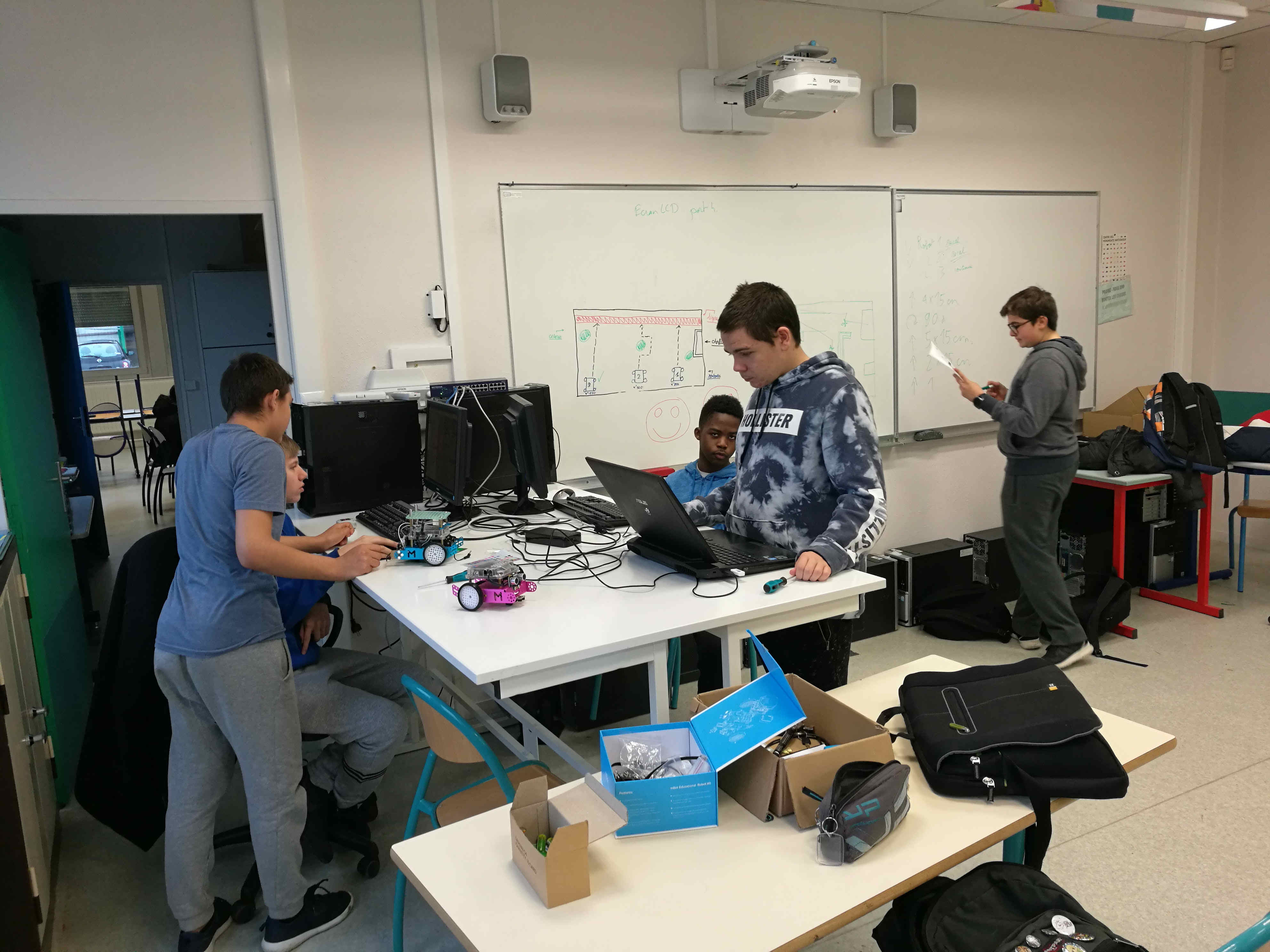
Petit à petit, nous avons progressé et après plus de 30 tentatives, nous avons réussi à faire notre vidéo de secours pour le concours. Et nos programmes fonctionnent enfin à 100% !
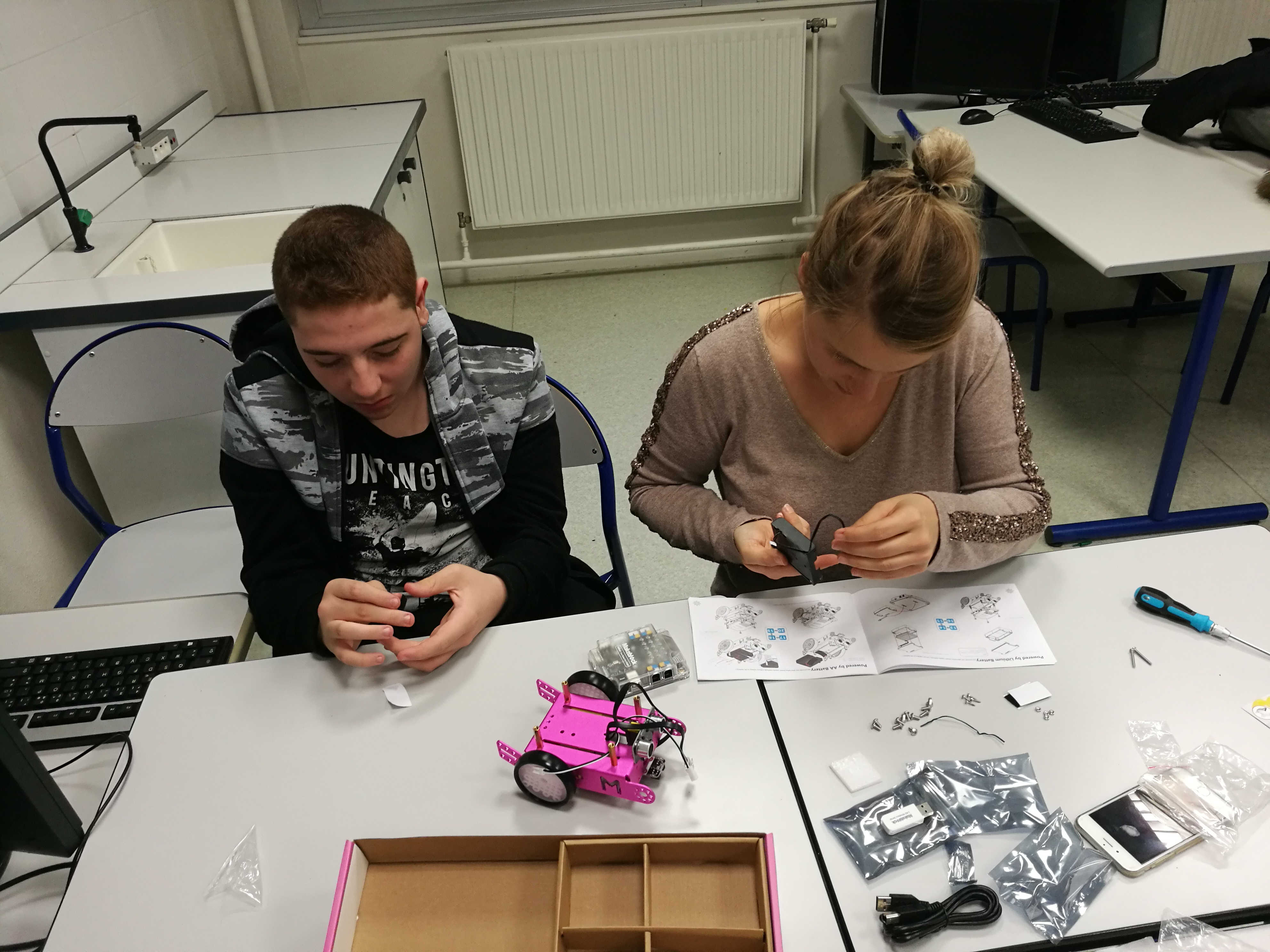
Nous avons quand même passé de très bons moments tout au long de l'année.
Une pensée à l'ensemble de erreurs de manipulation et aux bugs de Mblock.
Il est arrivé plusieurs fois que l'on ne retrouve pas nos fichiesr après une séance sans savoir pourquoi ... Nous avons du recommencer plusieurs fois certains programmes longs.
Evan et Lilian, pour les Bixbots